

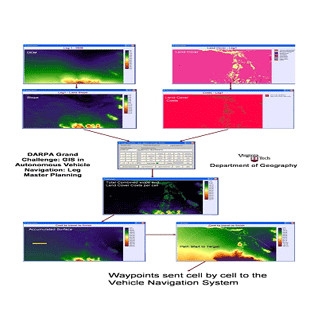
DARPA Grand Challenge
Dr. Bill Carstensen and four graduate and undergraduate students in the Department of Geography worked on a navigation system to aid the Virginia Tech Department of Mechanical Engineering’s entry in the DARPA Grand Challenge.
The proposed system used raster-based algorithms including cost/friction surfaces and accumulated surfaces to determine optimal master paths for the vehicle between GIS points. The GIS provided waypoints to the navigation system developed by the engineering students. The master plan path offered an optimal path based on the data presented, and the sensors mounted on the vehicle navigated around local obstacles not known in the GIS database. A GPS navigation tracking system provided up-to-date information on the current location of the vehicle to allow for re-computation of the optimal path if the vehicle was forced off course by local terrain features.
See our Previous Projects
